Brockhaus Konversationslexikon
Autorenkollektiv, F. A. Brockhaus in Leipzig, Berlin und Wien, 14. Auflage, 1894-1896
73
Glied (künstliches)
Anmerkung: Fortsetzung des Artikels 'Glied (künstliches)'
mag, besteht aus drei Hauptbestandteilen, aus dem sog. Körper oder der Hülse, die im allgemeinen die Form des verlorenen G. nachahmt und genügend fest und dauerhaft sein muß, aus dem sog. Mechanismus, der die einzelnen Hülsenteile miteinander verbindet und durch Scharniergelenke, Metallfedern, Kautschukstränge, Darmsaiten u. dgl. gewisse Stellungsveränderungen vermittelt, und aus den sog. Hilfsapparaten, denen die Befestigung des künstlichen G. am Amputationsstumpfe obliegt.

Figur 1:
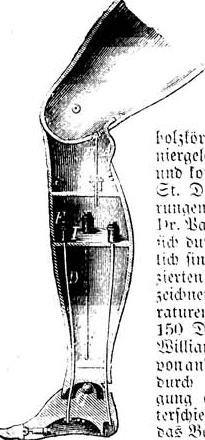
Hinsichtlich der untern Extremität galt lange Zeit der Stelzfuß für das beste Ersatzmittel, ein hinreichend starker hölzerner Stiel, an dem eine Hülse befestigt ist, die zur Aufnahme des Amputationsstumpfes dient (s. beistehende Fig. 1), und in der That erlangen viele Verstümmelte eine ganz außerordentliche Fertigkeit und Geschicklichkeit im Gebrauche ihres Stelzfußes; doch haben sich, ganz abgesehen von der Verunstaltung, die übermäßige Belastung des gesunden Fußes sowie die Notwendigkeit, beim Gehen mit dem Stelzfuß abnorme Drehbewegungen vorzunehmen, und die bei jungen Individuen hieraus entspringende Gefahr einer dauernden Verkrümmung der Wirbelsäule als schwerwiegende Nachteile herausgestellt.
Das erste brauchbare künstliche Bein fertigte Pott in Chelsea (1816) für den Marquis von Anglesey an, wobei er zuerst einen besondern Mechanismus für die Beugung des Knie- und Fußgelenks anbrachte. Dieses in England sehr verbreitete Anglesey-Pottsche Bein besteht aus einem Lindenholzkörper mit Stahlscharniergelenk, wiegt 3,70 kg und kostet ungefähr 35 Pfd. St. Die wichtigsten Verbesserungen sind: das Bein von Dr. Balmer in Amerika, das sich durch einen außerordentlich sinnreichen und komplizierten Mechanismus auszeichnet, aber häufige Reparaturen erfordert (Preis 150 Doll.); das Bein von William Selpho in Neuyork, von andern künstlichen Beinen durch zweckmäßige Anbringung einer Fersensehne unterschieden (Preis 150 Doll.); das Bein von Dr. Douglas Bly in Rochester, bei dem die Bewegungen nicht durch Metallfedern, sondern durch komprimierten Kautschuk hervorgebracht werden und dessen Sprunggelenk aus einem freibeweglichen Glaskugelgelenk besteht (Preis 175 Doll.); das Bein von Prof. Esmarch mit sinnreichem Kniegelenkmechanismus, besonderer Federvorrichtung für Beugung des ↔ Kniegelenks und Streckung des Fußgelenks und sehr freiem Zehenmechanismus (Preis 150 M.); das Bein von dem Amerikaner A. Marks, dessen aus Weichgummi bestehender Fuß mit dem Unterschenkel durch einen feststehenden Holzzapfen artikuliert und keinen Zehenmechanismus hat (Preis 100 Doll.) u. a.
Figur 2:
Zur Veranschaulichung des innern Mechanismus von künstlichen Beinen diene Fig. 2, einen Längsdurchschnitt durch das Bein von Douglas Bly in Rochester darstellend. Das Fußgelenk C wird durch eine Kugel von gut poliertem Glas gebildet, die in einer Höhlung von festem vulkanisiertem Kautschuk sich dreht und so jede Bewegung gestattet, welche das natürliche Fußgelenk macht. l stellt eine von den vier Kautschukfedern dar, welche die Stelle der Muskeln des natürlichen Beins vertreten und von starken Darmsaiten (D) durchbohrt werden, die sich nach abwärts an Stelle der natürlichen Sehnen erstrecken und in ihrer Spannung durch Schraubenmuttern (F) erhalten und reguliert werden. Ruht nun beim Gehen das Gewicht des Körpers auf der Kugel des Fußgelenks C, so ist die Kautschukfeder, die den Wadenmuskel vertritt, stark zusammengedrückt, und wenn das Gewicht des Körpers nach vorn auf den andern Fuß geworfen wird, so hebt sich die Feder und bringt den Fuß nach vorwärts. Auf die gleiche Weise werden die Bewegungen des Kniegelenks durch die Kautschukfeder E und den Draht H, die Bewegungen der Zehen durch die Feder O vermittelt; beschränkt und geregelt wird die Bewegung des Kniegelenks durch die Schnur A, die die Stelle der Kreuzbänder des natürlichen Kniegelenks vertritt.
Äußerst schwierig ist der künstliche Ersatz der obern Extremität, da es hier gilt, eine Reihe sehr zusammengesetzter und verwickelter Bewegungen zu ersetzen. Den ersten befriedigenden Apparat der Art stellte der Holländer van Peeterssen (1844) her, der ziemlich ausgiebige Fingerbewegungen dadurch ermöglichte, daß Darmsaiten, die mit dem einen Ende an den künstlichen Fingergliedern, mit dem andern an einem Korsett befestigt sind, durch Verkürzung bei verschiedenen Stellungen des Amputationsstumpfes einen Zug ausüben und dadurch den Widerstand von Federn, die sonst die Finger in beständiger Beugung erhalten, überwinden.

Figur 3:
Am kunstvollsten ist der von Charrière verfertigte künstliche Arm des Tenoristen Roger in Paris, der durch einen ähnlichen Mechanismus nicht nur jede beliebige Beugung und Streckung der Finger, des Handgelenks und des Vorderarms, sondern auch durch Einschaltung einer rechtwinklig zur Achse des Arms stehenden festen Scheibe, an deren Rand die außerhalb des Oberarms verlaufenden Saiten angreifen, ergiebige Drehbewegungen (Pronation und Supination) der Hand und des Vorderarms gestattet. Weitere Vorrichtungen dieser Art rühren von
Anmerkung: Fortgesetzt auf Seite 74.